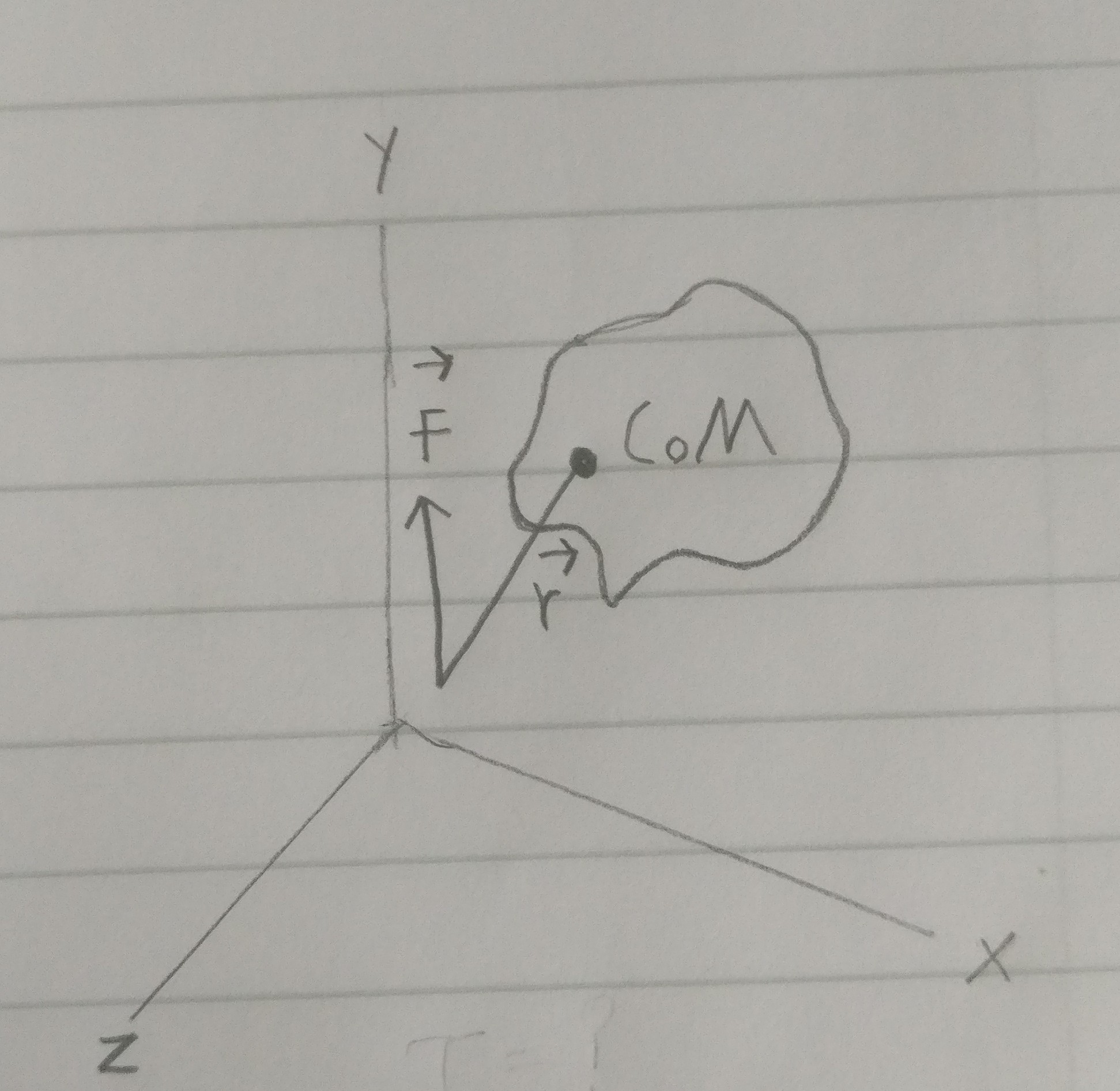
The orientation of the body is given by three Euler angles in the rotation sequence Y-Z-Y. What is the torque scalar in each of these axes derived from \vec{F} and \vec{r}?
Not sure I understand the question, especially the “rotation sequence Y-Z-Y” which is not indicated in the diagram.
My guess is it’s asking to find the magnitude of the torque components in each axis? i.e.
\vec{\tau} = \vec{r} \times \vec{F}
\tau_i = \Vert \vec{r_i} \Vert \Vert \vec{F_i} \Vert \sin \theta_i
where i = {x, y, z}
Just a guess.
Do you want your answer to include or exclude gauge theory?

2 Likes